

1·
3 months agoMaybe I’ll write something in the future

A Robotics enthusiast with a MSc degree in Engineering Physics, currently diving into a Ph.D.
Maybe I’ll write something in the future
It was not too hard if you are already familiar with Nix. The features supported (and the custom Linux kernel) can be found in surface-linux. For NixOS I used the nix-hardware flake to simplify things.
The worst part was the compilation of the Linux kernel, that took hours on the surface. Eventually, I used the remote nix build feature to compile on a more capable computer.
I have a Microsoft Surface 7 running NixOS. Everything works, even touch/pen
I wanted something like this! I think I’m gonna give this a shot, thank you for sharing your work

You miss What If? The show with some of the best episodes imo
YYYY-MM-DD is easier to get sorted since most significant number is on the left.

The past few days in Portugal were very windy, might explain the high renewal percentage.
It is a very misleading number/information.

Yeah, I don’t understand how anyone can think that Portugal is one of the better functioning countries in Western Europe.
Reminds me the Max Fosh video of him cooking a meal in an active vulcano
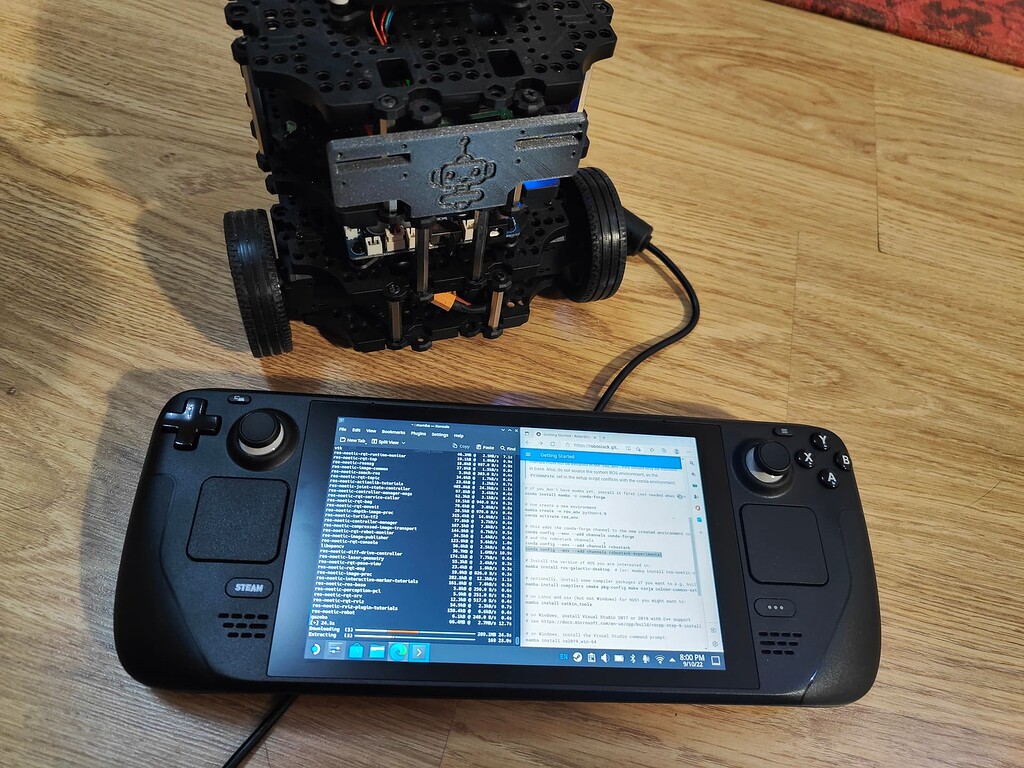
If you are using Unity you can check this online session to get started integrating ROS in Unity.
My goal is to figure out a system where I can declare the shape of a robot like this (armature size, number of joints, offsets etc) to create a virtual model of the robot.
This sounds like URDF.
Now, I’m sure there are systems and packages that do all the math for this already, so what tools/libraries do you guys use to do modeling like this?
It is normal to use ROS to send instructions and receive feedback from robots, you can also setup a simulated environment with ROS and Gazebo.
ROS can be a bit rough to get into, if you need any help, you can post on the ROS community.

I use both Julia and Rust, I did shot a few times in the foot with Julia (for instance, getting memory leaks on the GPU). Now, I use Julia (the REPL) when I want to quickly script some code and use Pluto.jl to plot data and teach programming.

I use EndeavourOS with Hyprland on my laptop but I am considering trying VanillaOS (once they move to Debian base). On desktop I have Ubuntu 20.04 and EndeavourOS (both on Gnome)





He gave an interview where he said he took off the the gloves during that penalty to play mind games on the opponent.